篇首语:本文由编程笔记#小编为大家整理,主要介绍了智能网联汽车 自动驾驶功能场地试验方法及要求相关的知识,希望对你有一定的参考价值。
车路协同优质资料整理地址:
- 语雀:车路协同、自动驾驶、车联网、智能网联车 · 语雀 (yuque.com)
本文件规定了智能网联汽车自动驾驶功能进行场地试验时的一般要求、试验项目和通过要求。 本文件适用于具备自动驾驶功能的M类、N类车辆,其他车辆类型可参考执行。
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文件, 仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本 文件。
GB 5768(所有部分) 道路交通标志和标线
GB 14886 道路交通信号灯设置与安装规范
GB 14887 道路交通信号灯
GB/T 24720 交通锥
GB/T 24973 收费用电动栏杆
GB/T XXXXX 汽车驾驶自动化分级
GB/T XXXXX界定的以及下列术语和定义适用于本文件。
3.1 自动驾驶功能 automated driving function
GB/T XXXXX中规定的3级及以上驾驶自动化功能的总称,包括“有条件自动驾驶”、“高度自动驾 驶”和“完全自动驾驶”功能。
3.2 试验车辆 vehicle under test;VUT
进行自动驾驶功能试验的车辆。
3.3 目标物 object target
用于构建试验场景的交通参与者及障碍物。
3.4 目标车辆 vehicle target;VT
用于构建试验场景的量产乘用车。
3.5 自动驾驶模式 automated driving mode
由自动驾驶系统执行全部动态驾驶任务的模式。
3.6 试验场景 testing scenario
车辆试验过程中所处道路、交通标志标线及目标物等要素及其状态的集合。
3.7 预计碰撞时间 pre-collision time
试验车辆在预设行驶轨迹中保持当前行驶速度到达与目标物的预碰撞点所需要的时间。
3.8 最高设计运行速度 maximum design operational speed
试验车辆在其设计运行条件下自动驾驶模式可运行的最高速度。
3.9 试验过程 testing process
试验车辆自第一个试验项目开始至选取试验项目全部完成。
3.10 引导车 leading vehicle
在试验车辆前方,与其处于同一车道,用于满足试验车辆自动驾驶模式激活条件的车辆。
3.11 稳定跟随
stable following 前后车辆速度差在±2 km/h以内并保持3 s以上。
3.12 起动 start moving
试验车辆行驶速度由0 km/h加速至2 km/h的行驶过程。
3.13 换道 lane changing
车辆车轮首次触碰车道边线到车辆全部车轮进入相邻车道。
下列符号适用于本文件。
Vmax 最高设计运行速度,单位为km/h。
5.1.1 试验场地应满足以下条件:
a) 试验场地具有良好附着能力的混凝土或沥青路面;
b) 交通标志和标线清晰可见,并符合 GB 5768 要求;
c) 道路及基础设施符合 GB 14886、GB 14887、GB/T 24973 要求;
d) 试验道路限速大于等于 60 km/h 时,车道宽度不小于 3.5 m 且不大于 3.75 m;
e) 试验道路限速小于 60 km/h 时,车道宽度不小于 3.0 m 且不大于 3.5 m;
f) 具备试验车辆自动驾驶模式正常激活的必要数据和设施条件。
5.1.2 试验环境应天气良好且光照正常环境下进行。若试验车辆需要在特殊天气或夜晚光照条件进行 试验,可参照附录 A。
目标车辆、自行车和摩托车应为大批量生产的乘用车、两轮自行车和两轮普通摩托车,或表面特征 参数能够代表上述车辆且适应传感器系统的柔性目标。
其中,目标车辆速度控制准确度应为±2 km/h。
交通锥高度应大于90 cm且符合GB/T 24720。 注:两轮普通摩托车指车辆纵向中心平面上装有两个车轮的普通摩托车,其尺寸为长小于等于2.5 m,宽小于等于 1.0 m,高小于等于1.4 m。
试验设备应满足以下要求:
a) 车内外视频采集设备分辨率不小于(1920×1080)像素点;
b) 运动状态采样和存储的频率不少于50 Hz;
c) 速度采集精度不大于0.1 km/h;
d) 横向和纵向位置采集精度不大于0.1 m;
e) 加速度采集精度不大于0.1 m/s2;
试验过程记录应包含以下内容:
a) 试验车辆自动驾驶系统软、硬件版本信息;
b) 试验车辆控制模式;
c) 试验车辆运动状态参数:
——车辆几何或质量中心点位置信息;
——车辆纵向速度;
——车辆横向速度;
——车辆纵向加速度;
——车辆横向加速度。
d) 试验车辆灯光和相关提示信息状态;
e) 反映驾驶员及人机交互状态的车内视频及语音监控情况;
f) 反映试验车辆行驶状态的视频信息;
g) 目标物的位置及运动数据。
5.3.1 试验车辆应满足以下人机交互要求:
a) 具备便于人工激活和关闭自动驾驶模式的操作方式;
b) 系统状态及人机转换过程提示信息清晰可见。
a) M1类车辆(以下简称“乘用车”):试验车辆质量处于整车整备质量加上驾驶员和试验设备的 总质量与最大允许总质量之间;试验开始后不改变试验车辆载荷状态;
b) M2类、M3类、N 类车辆(以下简称“商用车辆”):试验车辆在整车整备质量加上驾驶员及试 验设备的总质量和最大允许总质量状态下分别进行试验,试验开始后不改变试验车辆载荷状 态。
6.1.1 应根据试验车辆设计运行条件下的行驶区域按照附录 B 选取试验项目。
6.1.2 若试验车辆需要引导车作为自动驾驶模式正常激活的条件,试验过程应设置引导车并按照 5.2.2 记录引导车数据,引导车不应对试验结果产生影响。
6.1.3 试验道路限速设置应满足试验项目试验目的。
6.1.4 试验过程中应满足如下要求:
a) 各试验项目均在自动驾驶模式下完成;
b) 不进行自动驾驶系统软件版本及硬件配置变更。
6.2.1 按要求完成 6.1.1 所选取的试验项目,且各试验项目应按照第 7 章规定的相关试验方法进行三 次试验且三次均符合其设计运行条件的通过要求。
注:试验过程中试验车辆采取相应措施不与目标物发生碰撞,措施可包含但不限于减速、绕行等方式,本文件中不 限定实现避免碰撞的方式。
6.2.2 试验过程中试验车辆出现以下任一事件,试验过程应视为不满足通过要求:
a) 骑轧车道实线;
b) 不按路段规定行驶速度行驶;
c) 违反车道导向标线行驶;
d) 未按规定使用灯光;
e) 与道路基础设施发生碰撞。
试验道路为至少包含一条车道的长直道,根据Vmax在表1中选取相对应的任一组试验参数,标志牌之 间距离至少为100 m,其中,解除限速标志和恢复限速标志在同一平面。如图1所示。
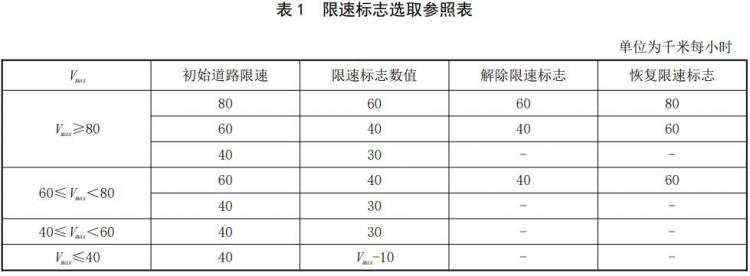
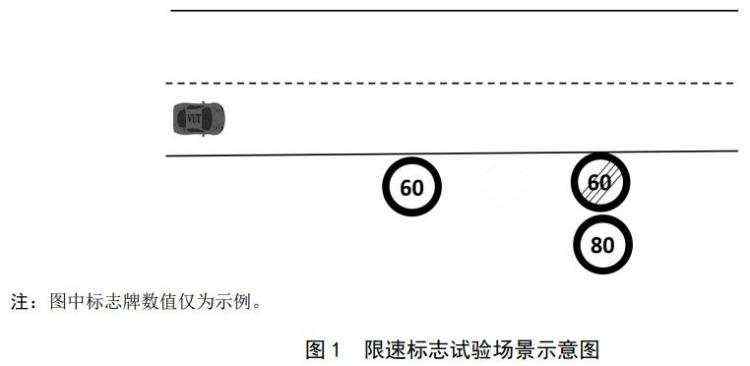
试验车辆以不低于初始道路限速数值0.75倍的速度在长直道内驶向限速标志。
试验车辆应满足以下要求:
——试验车辆最前端越过限速标志所在平面时,速度不高于限速标志数值;
——在限速标志牌间行驶时,试验车辆的行驶速度不低于当前限速标志数值的 0.75 倍;
——若存在解除限速标志,通过解除限速标志牌后 200 m 处,试验车辆行驶速度不低于当前限速 标志数值的 0.75 倍。
试验道路为长直道和弯道的组合道路,弯道长度应保证试验车辆在弯道内至少行驶5 s。
根据Vmax 在表2中选取对应的任一组试验参数,并设置相对应的限速标志牌。如图2所示。
注:最小弯道半径值为弯道中心到弯道上任一点距离的最小值
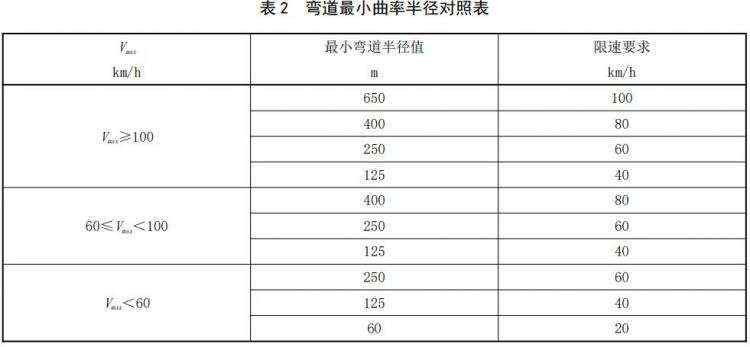
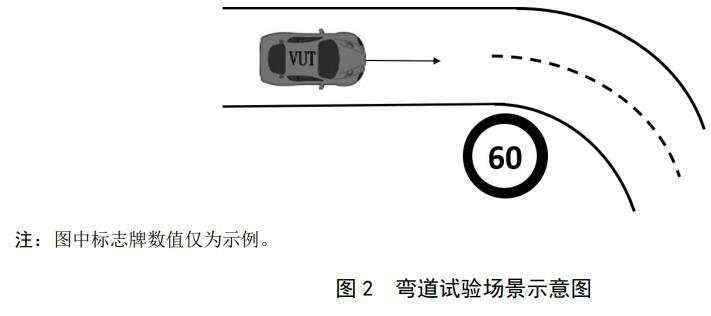
根据所选定的最小弯道半径进行试验。试验车辆由长直道驶入并驶出弯道。
试验车辆应满足以下要求:
a) 若试验车辆为乘用车,弯道内全程车速不低于 0.75 倍限速值;
b) 若试验车辆为商用车辆,弯道内全程车速不低于 0.5 倍限速值。
试验道路为至少包含两条双向两车道的丁字路口,并于交叉处设置停车让行标志牌和停车让行标 线。如图3所示。
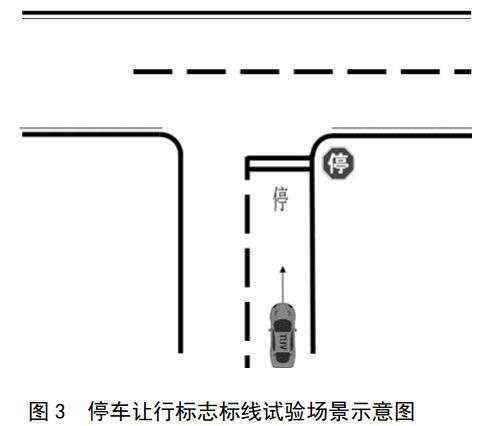
试验车辆在车道内驶向停车让行线。
试验车辆应满足以下要求:
a) 试验车辆应在停车让行线前停车且车身任何部位不越过停车让行线。
b) 若试验车辆为乘用车,车辆最前端与停车让行线最小距离不大于 2 m,车辆起动时间不超过 3 s。
c) 若试验车辆为商用车辆,车辆最前端与停车让行线最小距离不大于 4 m,车辆起动时间不超过 5 s。
试验道路为至少包含双向单车道的十字交叉路口,路口设置机动车信号灯且道路转弯半径不小于15 m,路段设置限速为40 km/h。如图4所示。
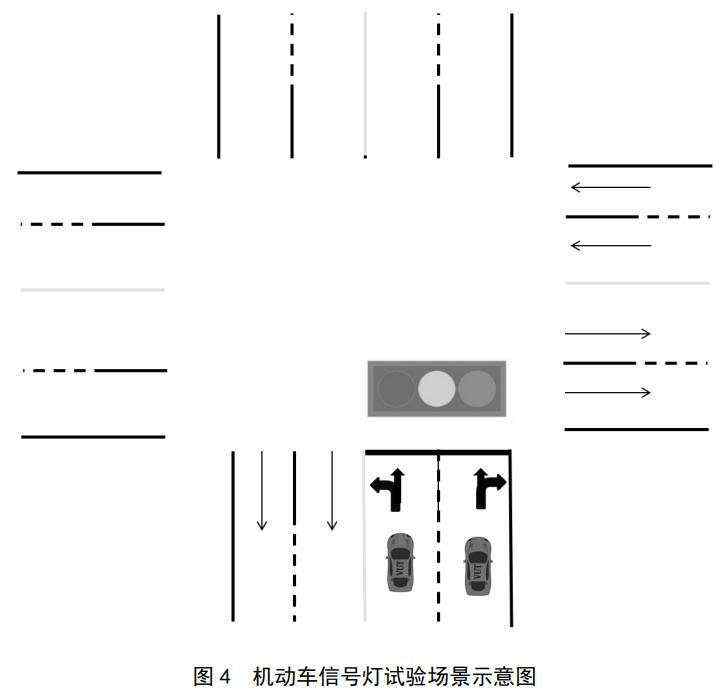
试验车辆在车道内驶向机动车信号灯。
机动车信号灯初始状态为绿灯并随机调整为下列两种信号灯 状态之一:
a) 绿灯:信号灯保持绿色状态;
b) 红灯:信号灯在试验车辆最前端距离停止线最小距离为 40 m~60 m 时由绿色变为黄色持续 3 s 后变为红色并持续 30 s 后变为绿色。
根据 6.2.1 要求,本场景下试验车辆应进行 3 次直行、3 次左转以及 3 次右转试验,且试验车辆同 一运动轨迹的 3 次试验中上述 a)、b)两种信号灯状态应至少各出现 1 次。
7.1.4.3.1 当进行绿灯和红灯右转试验时,试验车辆应通过路口并进入对应车道,在此过程中不应停 止行驶。
7.1.4.3.2 当进行直行、左转红灯试验时,试验车辆应满足以下要求:
a) 试验车辆在红灯时停止于停车线前且车身任何部位不越过停止线;
b) 若试验车辆为乘用车,车辆最前端与停止线最小距离不大于 2 m;信号灯变为绿色后,起动时 间不超过 3 s;
c) 若试验车辆为商用车辆时,车辆最前端与停止线最小距离不大于 4 m;信号灯变为绿色后,起 动时间不超过 5 s。
试验道路为至少包含双向两车道的十字交叉路口,路口设置包括直行、左转、右转的方向指示信号 灯且道路转弯半径不小于15 m,该路段设置限速为40 km/h。如图5所示。

试验车辆在在车道内驶向方向指示信号灯。车辆行驶路径方向的指示信号灯初始状态为绿灯,并随 机调整为下列两种信号灯状态:
a) 绿灯:车辆行驶路径方向的指示信号灯保持绿色状态;
b) 红灯:车辆行驶路径方向的信号灯在试验车辆最前端距离停止线 40 m~60 m 时由绿色变为黄 色持续 3 s 后变为红色并持续 30 s 后变为绿色。
根据 6.2.1 要求,本场景下试验车辆应进行 3 次直行、3 次左转以及 3 次右转试验,且试验车辆同 一运动轨迹的 3 次试验中上述 a)、b)两种信号灯状态应至少各出现 1 次。
7.1.5.3.1 当进行绿灯试验时,试验车辆应通过路口并进入对应车道,试验过程中不应停止行驶。
7.1.5.3.2 当进行红灯试验时,试验车辆应满足以下要求:
a) 试验车辆在红灯点亮后应停止于停车线前且车身任何部位不越过停止线;
b) 当试验车辆为乘用车,车辆最前端与停止线最小距离不大于 2 m;当车辆行驶路径方向指示信 号灯变为绿色后,起动时间不超过 3 s;
c) 当试验车辆为商用车辆时,车辆最前端与停止线最小距离不大于 4 m;当车辆行驶路径方向指 示信号灯变为绿色后,起动时间不超过 5 s。
试验道路为至少包含单向两车道的道路,道路上方均设置快速路车道信号灯。如图6所示。
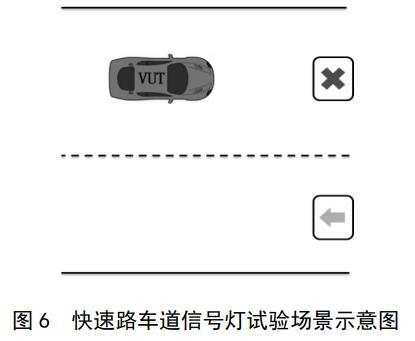
试验车辆在车道内驶向车道信号灯,相邻车道信号灯保持绿色通行状态,并提前调整该车道信号灯 为下列两种状态之一:
a) 绿色通行:该车道信号灯保持绿色通行状态;
b) 红色禁行:该车道信号灯保持红色禁行状态。 根据 6.2.1 要求,3 次试验中,上述 a)、b)两种信号灯状态应至少各出现 1 次。
7.1.6.3.1 若试验车辆具备信号灯识别功能,当进行绿色通行试验时,试验车辆应于本车道内通过交 通信号灯且在通过过程中不应存在停止行驶的情况。
7.1.6.3.2 若试验车辆具备信号灯识别功能,当进行红色禁行试验时,要求如下所示:
a) 若具备换道行驶功能,试验车辆应在信号灯前方驶入相邻车道;
b) 若不具备换道行驶功能,试验车辆应停止于信号灯前方,可发出超出设计运行范围的提示信息。
7.1.6.3.3 若试验车辆不具备快速路车道信号灯识别功能,试验车辆应在到达信号灯前发出超出设计 运行范围提示信息。
试验道路为至少包含长度不小于100 m隧道的单向两车道。如图7所示。
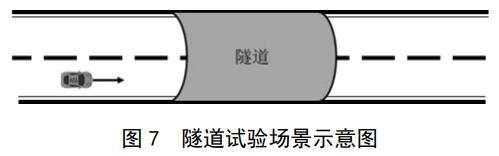
试验车辆在车道内驶向隧道。
7.2.1.3.1 若不具备隧道通行功能,试验车辆应在进入隧道前发出超出设计运行范围的提示信息且不 进入隧道区域。
7.2.1.3.2 若具备隧道通行功能,试验车辆应保持相同车道驶入并驶出隧道。
试验道路内设置包含不低于3个出入口的环形路口,每个出入口至少为双向两车道。试验车辆入口 上游存在1辆行驶目标车辆(VT1),下游第1个入口存在静止目标车辆(VT2)。如图8所示。
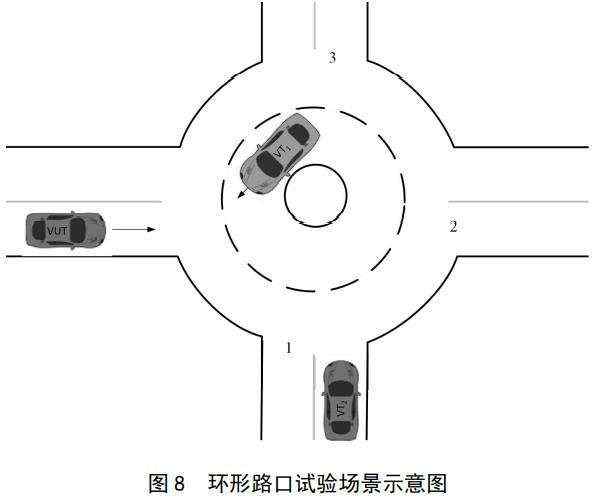
试验车辆在车道内驶向环形路口,且车辆路径规划从出口2或出口3驶出环形路口;当试验车辆到达 环形路口入口时,在入口上游存在以15 km/h的速度匀速行驶并计划于出口1驶出的目标车辆(VT1)。
7.2.2.3.1 若不具备环形路口内行驶功能,试验车辆应在进入环形路口前发出超出设计运行范围的提 示信息且不进入环形路口。
7.2.2.3.2 若具备环形路口内行驶功能,试验车辆应满足以下条件:
a) 由正确出口驶出环形路口并进入对应车道;
b) 不与目标车辆发生碰撞;
c) 在进入环形路口后不出现紧急制动或停止的情况。
试验道路为由一条不少于100 m的匝道连接的两条长直道(长直道1和长直道2),道路均应至少为 单向双车道。匝道入口处设置限速40 km/h的标志牌。如图9所示。
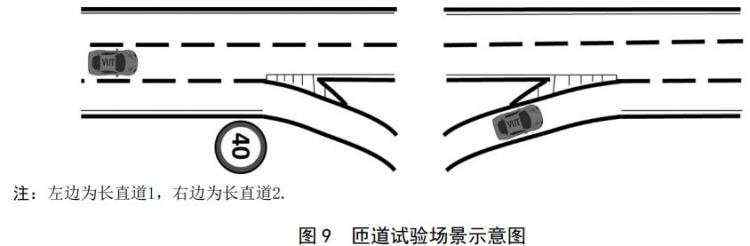
试验车辆根据路径设定并入最右侧车道后由长直道1行驶入匝道,通过并驶出匝道并入长直道2。试 验车辆若不具备匝道行驶功能,则无需进行本场景试验。
若试验车辆具备匝道通行功能,试验车辆应满足以下要求:
a)在匝道车道内驶入、驶出匝道并进入长直道2对应车道;
b)若试验车辆为乘用车,匝道内行驶全程速度不低于15 km/h。
试验道路为至少包含一条车道并设置有收费站的长直道,收费站前设置收费站标志、减速带等。如 图10所示。
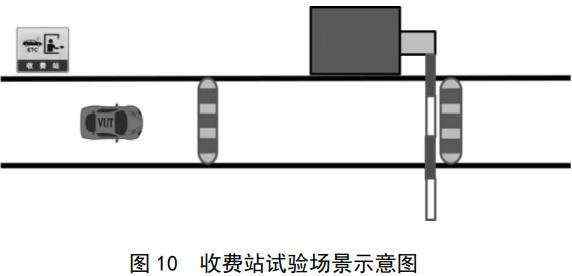
试验车辆沿试验道路驶向收费站。当试验车辆最前端与收费站升降栏最小距离为20 m~30 m时,升 降栏下降并于试验车辆速度降为O km/h后升起。
7.2.4.3.1 若不具备收费站通行功能,试验车辆应在到达收费站前发出超出设计运行范围的提示信息。
7.2.4.3.2 若具备收费站通行功能,试验车辆应在升降栏完全升起后 5 s 内起动。
试验道路为至少包含双向单车道且无信号灯的十字交叉路口,试验路段车速限制为 40 km/h。目标 车辆从路口右侧道路驶入路口。如图 11 所示。
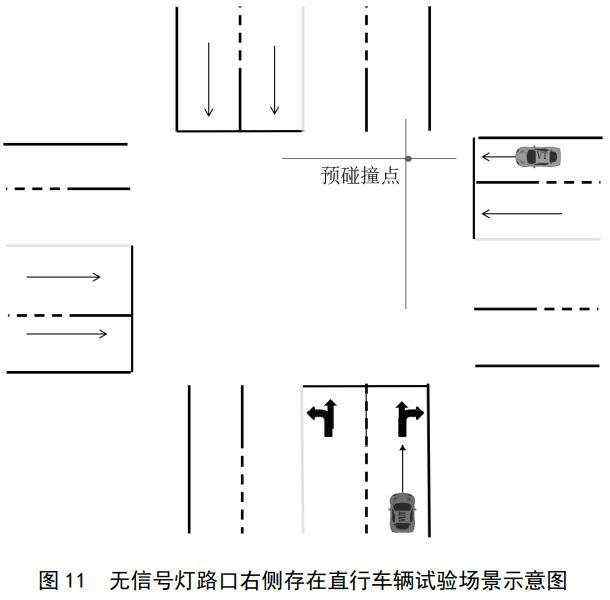
试验车辆根据路径设定在车道内直行通过该路口。当两车预碰撞时间首次到达4.5 s~5.5 s时间区 间时,目标车辆以20 km/h匀速直行通过路口。 7.2.5.3 通过要求 试验车辆应让行目标车辆并经由路口驶入对应车道。
试验道路为至少包含双向单车道且无信号灯的十字交叉路口,交叉路口转弯半径不小于 15 m,试 验路段车速限制为 40 km/h。目标车辆从试验车辆左侧外侧车道直行驶入路口。如图 12 所示。
注:在本标准中,外侧车道指多车道的车行道上紧靠路边侧的车道,也是车辆行驶方向最右侧的车道。
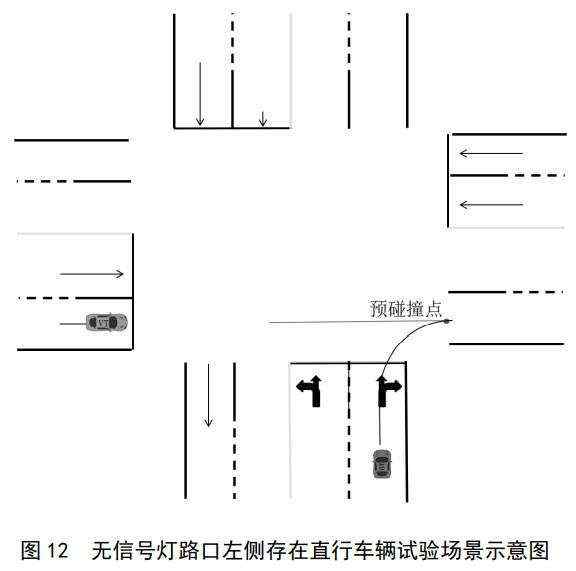
试验车辆根据路径规划在车道内行驶并右转通过该路口。当两车预碰撞时间首次到达4.5 s~5.5 s 时间区间时,目标车辆以20 km/h匀速直行通过路口。
试验车辆应让行目标车辆并经由路口驶入对应车道。
试验道路为至少包含双向单车道且无信号灯的十字交叉路口,交叉路口转弯半径不小于15 m,试验 路段车速限制为40 km/h。目标车辆从试验车辆对向车道直行驶入路口。如图13所示。
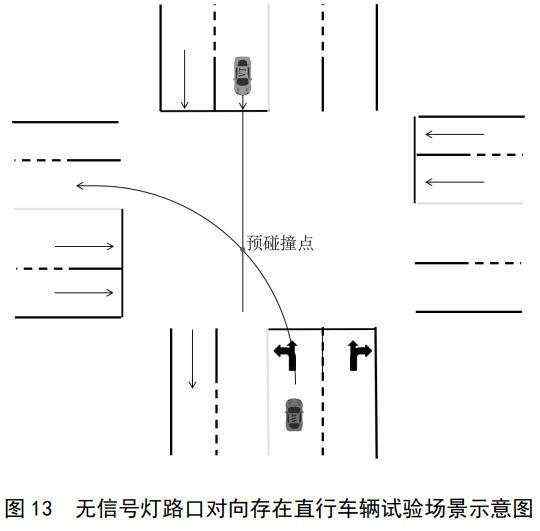
试验车辆根据路径规划在车道内行驶并左转通过该路口。两车预碰撞时间首次到达4.5 s~5.5 s 时间区间时,目标车辆以20 km/h速度匀速直行通过路口。
试验车辆应让行目标车辆并经由路口驶入对应车道。
试验道路至少为具备单向双车道的长直道,中间车道线为白色虚线。外侧车道依据道路施工长期作 业区的交通控制要求摆放交通锥及交通标志等。如图14所示。
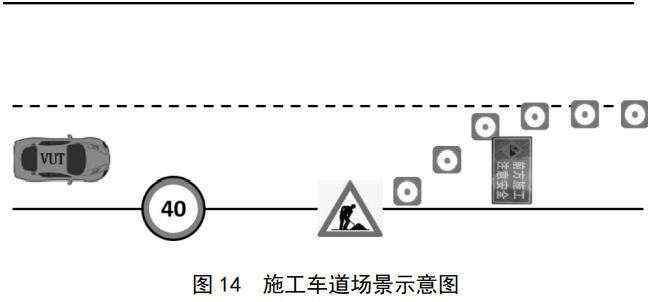
试验车辆在施工车道内驶向前方障碍物。
7.2.8.3.1 若不具备换道行驶功能,试验车辆应在行驶过程中或在车辆静止后发出超出设计运行范围 提示信息,停止于本车道内且不与障碍物发生碰撞。
7.2.8.3.2 若具备换道行驶功能,试验车辆应采用变更车道绕行障碍物。
试验道路至少为具备单向双车道的长直道,中间车道线为白色虚线,最左侧车道线为双黄实线。目 标车辆占用试验车辆行驶车道横向距离1 m~1.2 m静止停放且纵向轴线与中间车道线夹角不大于30°。 如图15所示。
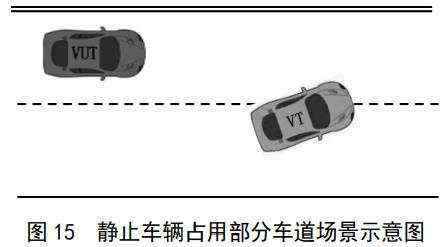
试验车辆沿试验道路驶向目标车辆。
试验车辆应不应与目标车辆发生碰撞。若试验车辆停止于本车道内,应在车辆行驶过程中或在车辆 静止后发出超出设计运行范围的提示信息。
试验道路至少为具备单向双车道的长直道,并在路段内设置人行横道线、人行横道预告标志线及人 行横道标志等相关标志标线,该路段限速40 km/h。左侧车道外侧存在行人,行人沿人行横道线横穿试 验道路。如图16所示。
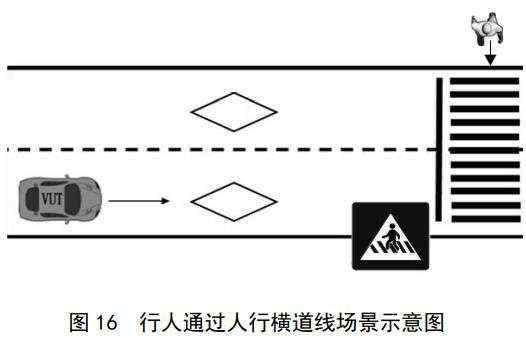
试验车辆在外侧车道行驶并驶向人行横道线,行人初始位置在人行横道线外。当预碰撞时间首次到 达 3.5 s~4.5 s 时间区间时,行人于车辆左侧以 5 km/h~6.5 km/h 的速度横穿人行横道线。
根据 6.2.1 要求,3 次通过本场景的过程中,目标行人应包括成年假人和儿童假人。
试验车辆不应与行人发生碰撞。若试验车辆在驶过人行横道线过程中停止,待行人通过试验车辆所 在车道后,试验车辆为乘用车时,起动时间不应大于 3 s,试验车辆为商用车辆时,起动时间不应大于 5 s。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。行人以5 km/h~6.5 km/h的速 度于距离车道右侧车道线内侧1 m~2.5 m范围内沿外侧车道行走。如图17所示。
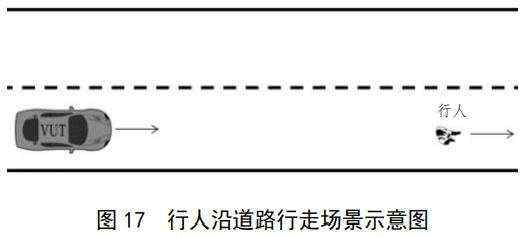
试验车辆于外侧车道驶向行人。若跟随行人行驶,当试验车辆速度不大于6.5 km/h时,且持续时间 超过5 s后,行人从车道右侧离开当前车道。
根据 6.2.1要求,3次通过本场景的过程中,目标行人应包括成年假人和儿童假人。
试验车辆应采用绕行或跟随方式通过该场景且不与行人发生碰撞。若采用跟随方式通过该场景,试 验车辆应在行人离开本车道后加速行驶。
跟随过程中,试验车辆可发出超出设计运行范围的提示信息, 当发出提示信息后,试验车辆在行人离开本车道后可不执行加速行驶。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。自行车以 10 km/h~20 km/h 速度于距离本车道右侧车道线内侧 1 m~2.5 m 范围内沿外侧车道骑行。如图 18 所示。若试验车辆 Vmax 小于 20 km/h 时,无需进行该试验项目。
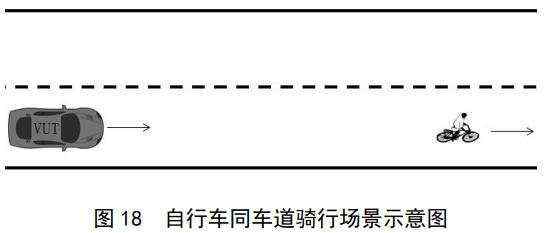
试验车辆于外侧车道驶向自行车。若跟随自行车行驶,当试验车辆速度不大于20 km/h时,且持续 时间超过5 s后,自行车从车道右侧离开当前车道。
试验车辆应采用绕行或跟随方式通过该场景且不与自行车发生碰撞。若采用跟随方式通过该场景, 试验车辆应在自行车离开本车道后加速行驶。跟随过程中,试验车辆可发出超出设计运行范围的提示信 息,当发出提示信息后,试验车辆在自行车离开本车道后可不执行加速行驶。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。摩托车以20 km/h~30 km/h 速度于距离本车道右侧车道线内侧1 m~2.5 m范围内沿外侧车道行驶。如图19所示。
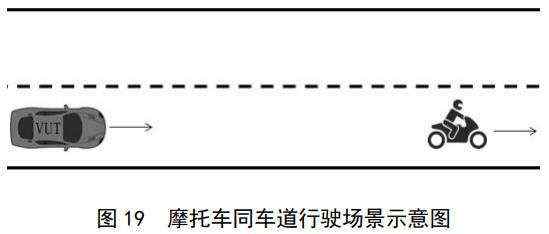
试验车辆于外侧车道驶向摩托车。若跟随摩托车行驶,当试验车辆速度不大于30 km/h时,且持续 时间超过5 s后,摩托车从车道右侧离开当前车道。
试验车辆应采用绕行或跟随方式通过该场景且不与摩托车发生碰撞。若采用跟随方式通过该场景, 试验车辆应在摩托车离开本车道后加速行驶。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。目标车辆以预设速度匀速行驶。 如图20所示。
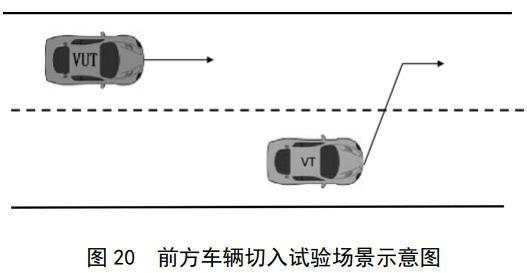
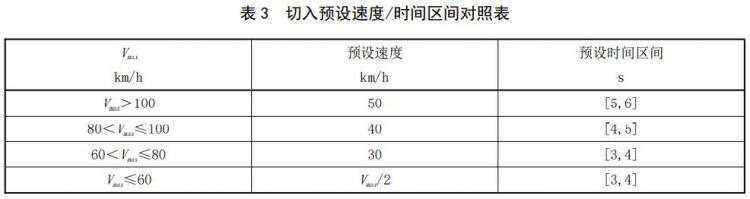
试验车辆于内侧车道行驶。当试验车辆达到Vmax的85%以上且两车预碰撞时间首次达到预设时间区 间,目标车辆由外侧车道开始切入内侧车道并完成换道,完成换道时间不大于3 s,且目标车辆在切入 过程中和切入完成后其纵向速度均等于预设速度。预设速度和预设时间区间如表3所示。
试验车辆不应与目标车辆发生碰撞。
试验道路为至少包含单向双车道的长直道,试验车辆前方存在目标车辆(VT1),相邻车道存在目 标车辆(VT2),VT1以Vmax的50%速度匀速行驶,试验路段限速大于目标车辆行驶速度。如图21所示。
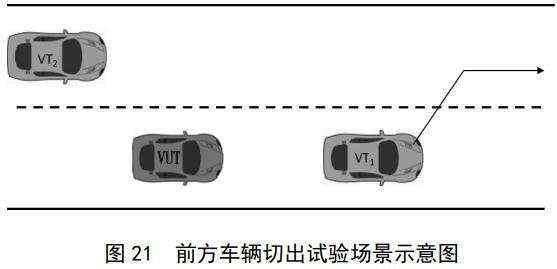
试验车辆在外侧车道驶向VT1。当试验车辆稳定跟随VT1后,VT1开始换道并入相邻车道,完成换道时 间不大于3 s。VT2最前端在VT1换道开始前保持在与试验车辆最后端3 m以内行驶。
试验车辆不应与目标车辆发生碰撞;当目标车辆切出后,试验车辆应执行加速动作。
试验道路为包含双向单车道的长直道,中间车道线为黄色虚线,该路段限速40 km/h。目标车辆越 过中间车道线占用对向车道宽度的25%~30%并以30 km/h匀速行驶。如图22所示。

试验车辆在车道内行驶且速度波动在2 km/h以内保持3 s以上。试验车辆与目标车辆初始纵向距离 不小于200 m并逐渐接近。记录两车相距200 m时试验车辆速度为初始速度,当两车距离小于200 m且试 验车辆速度较初始速度降幅大于5 km/h或试验车辆发出超出设计运行范围提示信息时,目标车辆驶回原 车道。
7.4.4.3.1 若降幅不大于 5 km/h,试验车辆应完成会车且不与目标车辆发生碰撞。
7.4.4.3.2 若降幅大于 5 km/h,当目标车辆驶回后,试验车辆应继续行驶。试验车辆可在行驶过程中 发出超出设计运行范围的提示信息,若发出提示信息可不执行继续行驶动作。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线;外侧车道内存在以Vmax的75%匀 速行驶的目标车辆。如图23所示。

试验车辆稳定跟随目标车辆行驶后,目标车辆以2 m/s2~3 m/s2减速度减速直至停止;若试验车辆 保持跟随状态,当试验车辆车速降为0 km/h后,目标车辆保持原车道起步并于2 s内达到10 km/h行驶。
7.4.5.3.1 若具备换道行驶功能,目标车辆减速至停止过程中,试验车辆应完成换道并超越目标车辆 且不与目标车辆发生碰撞;试验车辆为乘用车时,完成换道时间不应大于 5 s。
7.4.5.3.2 若不具备换道行驶功能,试验车辆应跟随目标车辆行驶且不与目标车辆发生碰撞;试验车 辆为乘用车时,起动时间不应大于 3 s,试验车辆为商用车辆时,起动时间不应大于 5 s。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。若Vmax大于等于60 km/h,该路 段限速60 km/h;若Vmax小于60 km/h,该路段限速40 km/h。道路存在行人横穿道路行为。如图24所示。
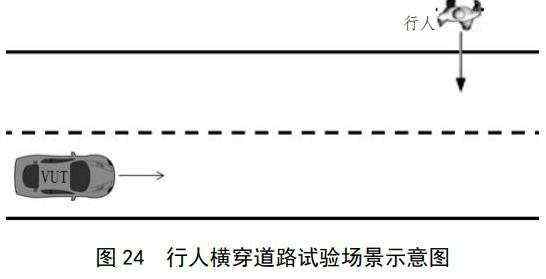
试验车辆在最右侧车道内行驶。当预碰撞时间首次到达3.5 s~4.5 s时间区间时,行人于试验车辆 左侧以5 km/h~6.5 km/h的速度横穿道路动作,并通过试验车辆所在车道的最右侧车道线。
根据 7.2.1 要求,3次通过本场景的过程中,目标行人应包括成年假人和儿童假人。
试验车辆不应与行人发生碰撞。
试验道路为至少单向双车道的长直道,中间车道线为白色虚线。若Vmax大于等于60 km/h,则该路段 限速60 km/h,若Vmax小于60 km/h,则该路段限速40 km/h。道路存在自行车横穿道路行为。如图25所示。
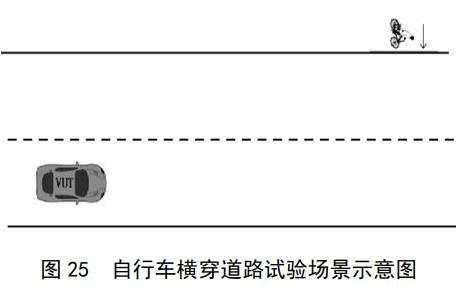
试验车辆在外侧车道内行驶。当预碰撞时间首次到达3.5 s~4.5 s时间区间时,自行车于试验车辆 左侧触发以14 km/h~16 km/h速度横穿道路动作并停止于试验车辆当前行驶车道中间并停止2 s后自行 车继续加速至14 km/h~16 km/h速度通过该道路。
试验车辆不应与自行车发生碰撞。
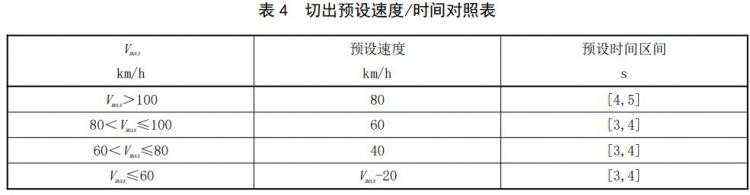
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。外侧车道内存在两辆目标车辆 (VT1和VT2),其中VT1以预设速度驶向静止状态VT2,两辆目标车辆的中心线偏差不超过0.5 m。如图26 所示。
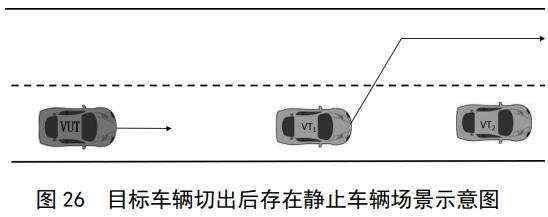
试验车辆稳定跟随VT1在相同车道内行驶,当VT1距离VT2预碰撞时间首次到达预设区间内时执行换道 动作驶入相邻车道,完成换道时间不大于3 s。预设速度及预设时间区间如表4所示。
试验车辆不应与目标车辆发生碰撞。
试验道路为仅有一条车道的长直道且两侧车道线为实线;车道内存在以Vmax的75%匀速行驶的目标车 辆。如图27所示。
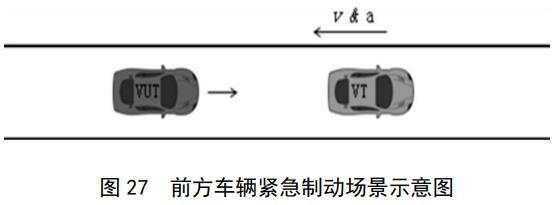
试验车辆稳定跟随前方行驶的目标车辆。目标车辆1 s内达到减速度6 m/s2并减速至停止。
试验车辆不应与目标车辆发生碰撞。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线。道路边存在停车点且停车区域 道路旁具有足够空间不影响车辆右侧车门的正常打开。试验车辆若不具备换道功能,则无需进行本场景 试验。如图28所示。
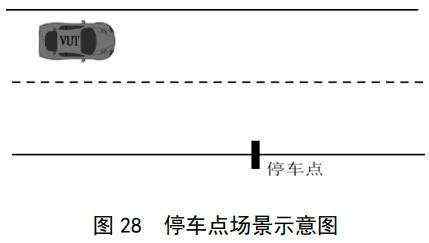
试验车辆在停车点所在车道的左侧车道内行驶,靠近指定位置停车点。
试验车辆应满足以下要求:
a) 不出现倒车动作;
b) 距离车道内侧最大距离不大于 0.3 m;
c) 距离停车点最大纵向偏差不大于 10 m。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线,路段内设置港湾式公交站,站 台长度不小于25 m,设置上、下客区域。如图29所示。
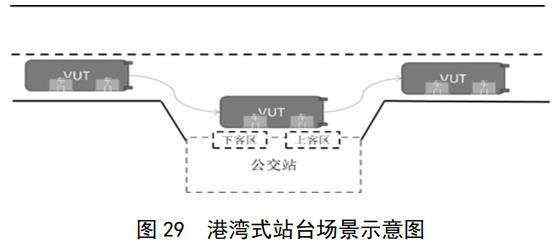
试验车辆驶向港湾式站台。
试验车辆应满足以下要求:
a) 试验车辆一次性进入港湾式站台并完成停靠,无倒车调整情况,并保证车门与站台上、下客 区域的对应。
b) 试验车辆一级车门踏步中心外沿距离车道内侧最大距离不大于 0.3 m。
c) 试验车辆在静止后 3 s 内开始开启站台同侧车门。
试验道路为至少包含单向双车道的长直道,中间车道线为白色虚线,路段内设置普通站台,设置上、 下客区域。如图30所示。
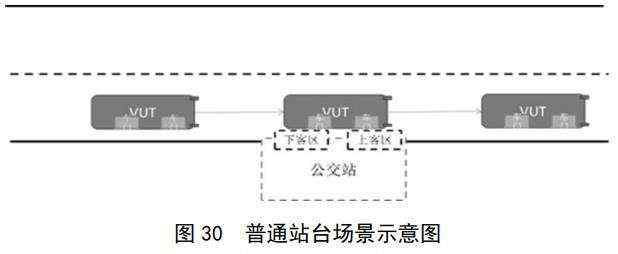
试验车辆驶向普通站台。
试验车辆应满足以下要求:
a) 试验车辆一次性进入普通站台并完成停靠,无倒车调整情况,并保证车门与站台上、下客区 域的对应。
b) 试验车辆一级车门踏步中心外沿距离车道内侧最大距离不大于 0.3 m。
c) 试验车辆在静止后 3 s 内开始开启站台同侧车门。
试验车辆以自动驾驶模式于长直道内行驶,驾驶员根据试验车辆可实现自动驾驶模式退出的方式执 行干预操作。
试验车辆应向驾驶员交出动态驾驶任务执行权限;交出权限后,自动驾驶系统不应自主恢复自动驾 驶模式。
在7.1.6、7.2.1、7.2.2、7.2.4、7.2.8、7.2.9、7.3.2、7.3.3、7.5.1、7.5.2、7.5.3、7.5.4 试验过程中,若试验车辆发出超出设计运行范围提示信息,驾驶员均不对试验车辆行驶状态进行人为干 预。
若试验车辆进行上述所有试验项目过程中,均未发出超出设计运行范围提示信息,则进行7.8.3补 充试验用例。
试验车辆不应与目标物发生碰撞。
试验道路为至少包含一条车道的长直道,在各车道内均垂直于道路行驶方向均匀放置至少3个交通 锥,该路段道路限速60 km/h。如图31所示。
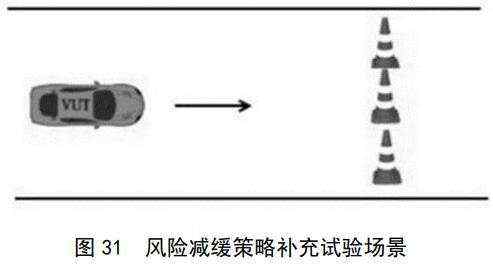
试验车辆驶向前方交通锥,行驶过程无人为干预。
试验车辆应满足以下要求:
——避免与交通锥发生碰撞;
——在行驶过程中或障碍物前静止后发出超出设计运行范围提示信息。
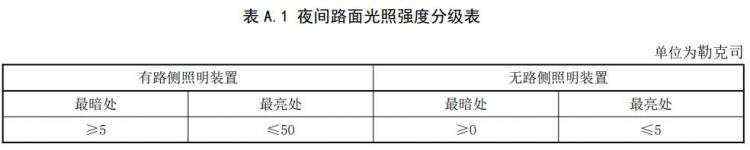
本附录规定了试验车辆需要进行夜间或特殊天气试验的方法。
若试验车辆需要进行夜间环境试验,根据其设计运行条件选取表A.1对应光照强度,进行7.1.1所选 取的全部试验项目并满足通过要求。
若试验车辆需要进行特殊天气(雨、雪、雾等)试验,在对应的天气环境下,进行6.1.1所对应的 全部试验项目并满足通过要求。
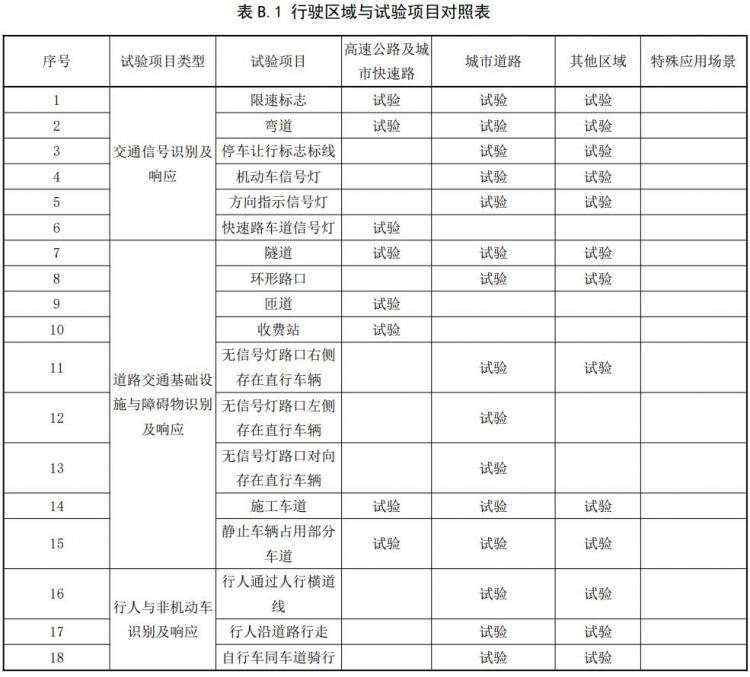
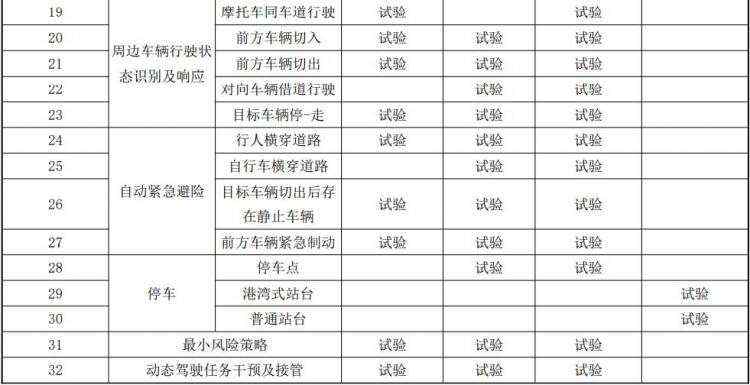
本附录根据自动驾驶系统设计运行条件将行驶区域分为高速公路及城市快速路行驶区域、城市道路 行驶区域、其他行驶区域和特定应用场景
试验车辆应根据设计运行条件确定一个或多个行驶区域并完成该行驶区域下的试验项目。若试验车 辆涉及特殊应用场景,应作为相应行驶区域的补充试验项目。行驶区域与试验项目对照关系如表B.1所 示。




 京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有
京公网安备 11010802041100号 | 京ICP备19059560号-4 | PHP1.CN 第一PHP社区 版权所有